儘管有非技術媒體鑒於特斯拉(Tesla)Model S電動車最近發生的致命事故而預言自動駕駛車輛的消亡,筆者還是想在這篇文章中介紹感測器電子元件以及更好、更精進的軟體演算法,而它們終究可望在接下來的十年內實現安全的全自動駕駛車輛。
Tesla已經一再表明Model S並非自動駕駛車輛,Tesla電動車駕駛人需要清楚地認知:「這種系統只是新技術,並且仍處於公開測試階段。」
而BMW、Mobileye和英特爾(Intel)三家公司在7月份宣佈合作開發自動駕駛車輛平台時,也強調「安全第一」的原則,因為駕駛人的安全最重要。
美國全國公共廣播電台(NPR)記者Sonari Glinton在最近的一場廣播節目討論中也表示,Tesla Model S是具備自動駕駛「功能」,而這些功能只是提供輔助、並非要替代駕駛人。
Google的全自動駕駛測試車輛則是仰賴成本更高、更複雜,採用光達(LiDAR)技術的遠端感測(remote sensing)系統。
Tesla執行長Elon Musk曾表示:「全自動駕駛車輛顯然需要360度攝影機,可能還需要額外的前向(forward) 攝影機、運算硬體,以及電動馬達和轉向齒條(steering rack) …也就是說,我認為並不需要LiDAR,只要利用被動光學元件和一個前向雷達就能實現自動駕駛。」他正致力為消費性市場推出價格相對能被大眾負擔,且強調安全性的車輛。
Tesla的Autopilot自動駕駛系統仰賴:「攝影機、雷達、超音波感測器和資料的結合,以自動控制汽車在高速公路上的行駛、變換車道以及根據交通流量調整速度;」該系統採用以色列晶片設計業者Mobileye提供的自動剎車技術。
Tesla電動車採用的Mobileye Emergency自動剎車功能,是「專門為避免後方追撞所設計」,因此無法避開今年7月1日在美國發生之Model S致命事故中的側面碰撞;如前面提及,這種技術還在繼續進行開發。例如有相關文獻描述了以視覺技術為基礎的自動駕駛動態控制設計,並將重點放在緊急避障功能中的協調轉向(coordinated steering)和剎車控制;另有相關文獻介紹了一種創新方法,可以用來避免致命的意外事故。
Google已經在美國數個州進行自動駕駛車輛測試;Tesla則宣佈在今後三年內推出完全自動駕駛車輛;共乘服務業者Uber則在美國匹茲堡(Pittsburgh)開設了一個測試場地,準備發展一個自動駕駛計程車隊。
日本車廠豐田(Toyota)曾透露,其公路自動駕駛汽車安裝了12個用以擷取資料的感測器,包括1個安裝於後照鏡背面的攝影機模組,5個使用無線電波擷取其他車輛速度的雷達感測器,以及6個用於檢測汽車周圍物體位置的雷射感測器。
還有美國加州已經頒佈了在公共道路上測試、操控自動駕駛車輛的法律框架。
雖然我們尚未準備好迎接全自動駕駛車輛,但應該是在不遠的未來——在那之前,我們的手還是得握好方向盤,眼睛也要隨時盯著路況。
感測器是自動駕駛的眼睛和耳朵
若自動駕駛車輛擁有「耳朵」,能在警車、救護車或消防車駛近,能透過車載攝影機或LiDAR看到前先聽到警笛聲並確定其方向…怎麼樣?或者在駕駛人、LiDAR或攝影機的視力所及之前,就先聽到重型機車接近的聲音呢?
以下讓我們來看看自動駕駛車輛使用的各種感測器技術──是以設計工程師對電子感測器的專業見解,探索這些感測器如何與內建先進處理器與軟體演算法的車輛「大腦」相連。
扮演自動駕駛車輛眼睛的技術
LiDAR 這是一種使用旋轉雷射光束的系統,獲得BMW及Google、日產(Nissan)和蘋果(Apple)研發的實驗用自動駕駛車輛採用,但若要在大眾車款中應用這類系統,必須等待其成本大幅下降。

圖 1 LiDAR基本原理:圖為一對單發射器 /檢測器搭配可活動旋轉鏡的 LiDAR設計;這種架構可以實現至少一個平面上的掃描;其中的鏡子不僅可以反射二極體發出的光,還能將返回光線反射到檢測器。透過在這種應用中配置旋轉鏡,可以實現 90~180度的典型方位視角,同時簡化系統設計和可製造性,因為只有鏡子是活動零件。 (圖片來源: Velodyne)
美國業者Velodyne能提供一種高解析度LiDAR(HDL)感測器,以因應自動駕駛車輛導航的嚴格要求;其HDL元件可以提供360度的方位視角和26.5度的高度視角,以及15Hz的畫面更新率(frame refresh rate),還有以每秒100萬點速度填入的點雲(point cloud)。
光脈衝以前一直被用來測量距離,這種基礎技術用雷射二極體發射光脈衝;光線會一直傳播,直到遇到一個目標,此時一部分光能會被反射回發射器,在靠近發射器的地方安裝的光子檢測器會檢測到這個反射回來的訊號,而發射脈衝和接收脈衝的時差確定了目標的距離,若啟動這個脈衝距離測量系統,則可以收集到大量的採樣點(也就是「點雲」)。
如果沒有出現任何目標物,那麼發射出去的光永遠不會返回任何反射訊號;如果光線是指向地面,路面就會提供返回訊號。如果目標位於點雲中,就可以在資料中看到一個缺口(notch),根據這個缺口即可確定目標物的距離和寬度。透過點雲中收集的點,便可形成周邊環境的3D影像;點雲越密集,影像就越豐富。
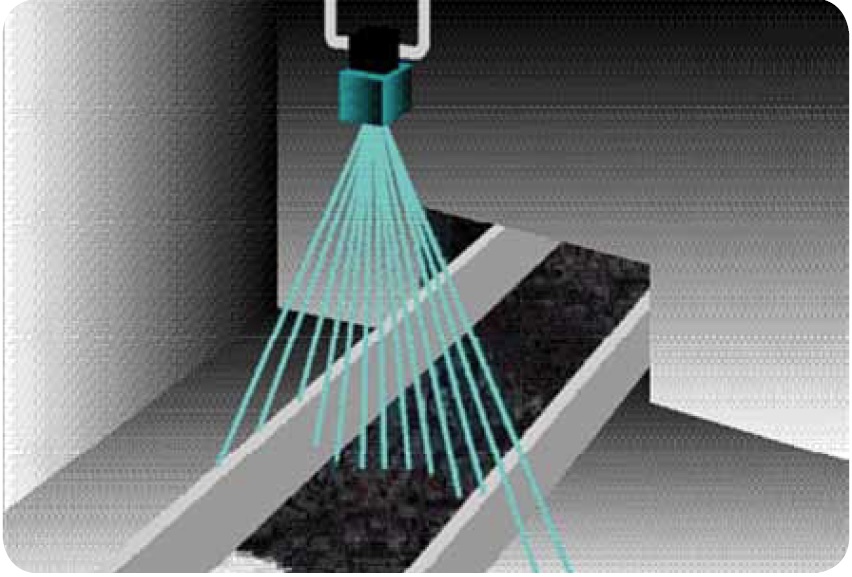
圖2 傳統的單發射器/檢測器配對之雷射感測器應用。(圖片來源:Velodyne)
3D LiDAR 方案實現3D LiDAR的一種方法是在鏡子旋轉時上下移動發射器/檢測器──有時稱為「眨眼(winking)」或「點頭(nodding)」──這將產生高度(elevation)資料點,但也會減少方位資料點的數量,從而降低點雲密度,造成系統解析度降低。
另外一種方法是「快閃(flash)LiDAR」,該類系統運作時會同時照亮一大片區域,然後在一個專屬2D焦平面陣列(FPA)上擷取所產生的像素距離(pixel-distance)資訊;這種類型的感測器很複雜、生產不易,因此沒有獲得廣泛商用,然而有一天可望替代機械致動感測器,因為它們是固態元件,不需要活動零件。
業界還有許多不同配置的3D點雲系統,但這些系統目前還無法滿足自動駕駛車輛的安全性需求;舉例來說,有許多系統能夠拍到很棒的照片,但拍一張就得好幾分鐘,這種系統就不適合行動感測應用。當然也有具備優異更新率的快閃系統,但視場不足且距離性能也不夠;還有可提供實用訊的單束系統,但當目標物體太小或落在裝置視場以外,這種系統就無法發揮作用。
為了使LiDAR感測器適應最多的使用情境,有必要看清收集點四周的每個角落,即全360度。另外,處理後的資料需要即時遞送給使用者,因此在資料收集和渲染影像之間的延遲必須最小化;例如在自動駕駛導航領域,零點幾秒的人類反應時間一般是可以接受的,因此保證導航電腦的更新率至少每秒十次是很實際的要求。垂直視場需要擴展到地平線之外,以防汽車開進路面凹陷處;也應該盡可能朝看清汽車前方的路面延伸,以適應道路凹陷或陡坡。
各種平價LiDAR感測器產品
Velodyne曾推出一款型號為VLP-32A的車用LiDAR感測器,這款命名為ULTRA Puck的產品(圖3)號稱是首款經濟型、可滿足美國汽車工程師學會(SAE)定義之汽車自動化1~5級要求的LiDAR感測器。福特(Ford)是第一家訂購ULTRA Puck的汽車製造商,準備將其應用於該公司最近宣布擴編的自動駕駛車隊,預計今年稍晚上路。

圖3 Velodyne的ULTRA Puck感測器可實現長達200公尺的覆蓋距離,支援32個LiDAR通道,其提升的解析度可以更容易識別物體;這32個通道部署在28度的垂直視場上,並以獨特的模式配置,能提高地平線上的感測解析度。(圖片來源:Velodyne)
加拿大業者LeddarTech的LiDAR解決方案Leddar(圖4)也讓人印象深刻;該公司有獨立的先進駕駛輔助系統(ADAS)和在被動和主動安全系統中使用的經濟型LiDAR,並能為先進的感測器融合之整合提供原始資料量測。其感測器冗餘(Sensor Redundancy)突破了其他感測器的侷限性,可避免系統故障和檢測誤差,並改善各種環境條件下的檢測。其應用於自動駕駛的360度點雲功能,則可滿足更高解析度和更高性能需求,未來還將提供支援360度和高解析度檢測的版本。
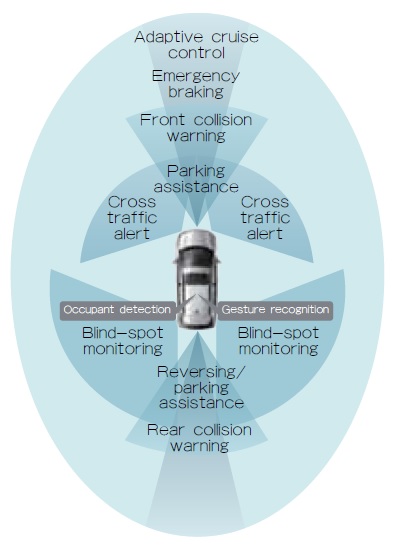
圖 4 加拿大業者LeddarTech的LiDAR解決方案Leddar。
適合所有等級自動駕駛車輛且能繪製車輛周遭360度環境地圖的經濟型LiDAR,對司機、乘客、行人,和其他車輛乘客的安全來說都至關重要。Leddar晶片組的原始資料輸出功能使其非常適合先進的感測器融合解決方案──這類方案將各種感測器傳送過來的資料整合,來提供汽車四周的整體感知圖。其特色包括:
˙能整合到ADAS和自動駕駛功能,固態LiDAR將代替或補充其中的攝影機和/或雷達。 ˙高密度3D點雲LiDAR,可實現更高等級的自動駕駛。 ˙支援快閃/光束操控LiDAR(即MEMS微型反射鏡)。 ˙覆蓋距離達250公尺,視場達140 °,每秒多達48萬個點(水平和垂直解析度可小至0.25°)。
最後還有一家荷蘭業者Innoluce(編按:英飛凌科技-Infineon已於10月宣佈收購該公司)推出的車用LiDAR,號稱能覆蓋250公尺的目標範圍,解析度達0.1°,價格為100美元。
視覺影像感測器
雖然2D LiDAR很多時候是與視覺感測器整合,不過我們在這裡只討論視覺感測器本身。首先是Mobileye的方案,Mobileye Shield+是Tesla採用的一種非常先進的防碰撞系統,支援Vision Zero交通事故零傷亡願景(這是一個獲得許多國家支持的交通安全目標,即實現無致命或嚴重傷亡的公路系統,是1997年10月由瑞典發起);不過該系統僅能在即將與行人發生碰撞時提醒駕駛,不能檢測無生命的物體。
Mobileye的防碰撞系統具有以下功能:
˙行人和與騎士碰撞警告(Mobileye PCW)。 ˙正向碰撞警告(Mobileye PCW)。 ˙前方車距監測警告(Mobileye HMW)。 ˙車道偏離警告(MobileyeLDW)。 ˙道路限速指示(SLI)。
此外該公司的Mobileye 5系統支援藍牙,可以透過智慧型手機應用程式提供駕駛人即時音/視訊警告。
美國喬治亞理工學院(Georgia Institute of Technology)提出了一種創新的3D系統封裝架構,不僅考慮了電氣、機械和散熱設計,還考慮了新的數位、射頻、感測器、雷達毫米波和電源技術;他們計劃開發高度創新、以大面板為基礎的超薄玻璃封裝,以及在電氣、熱、機械設計、材料、製程、繞線微影、精細間距、高吞吐組裝,及用於訊號、電源傳輸和導熱的高傳導性銅通孔(through Coppervias)等方面的創新。
透過開發防碰撞感測器來強化自動駕駛車輛技術,還需實現更多進步,才能實現與城市基礎設施連結的新時代,如圖5所示。

圖5 與周圍基礎設施的無線連結,是提升自動駕駛車輛安全性所需的關鍵因素之一。
汽車感測器和通訊技術領域的最新發展,提高了駕駛對車輛周邊環境的能見度和意識,並實現了其他許多令人驚歎的功能,比如停車輔助、自適應巡航控制、車道維持輔助、交通標誌識別和行人偵測等,如圖6所示。
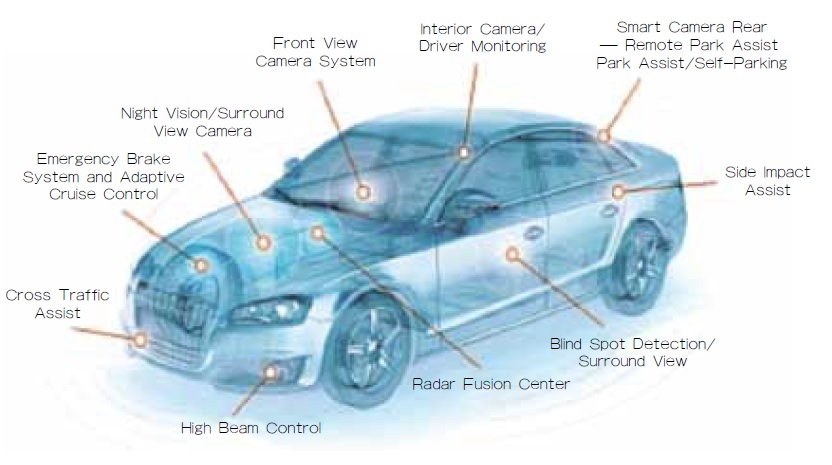
圖6 新一代感測器技術進一步強化了ADAS功能。
IC整合/封裝
汽車電子系統需要執行包括無線通訊在內的許多功能,需要應用於與自動駕駛安全相關資料處理的無線感測、立體攝影機、毫米波電子元件、高頻電子元件或光子元件,還有用於電動車的高功率、高溫電子元件。
將以上所有元件透過電晶體整合為單晶片,或是以堆疊式封裝/系統級封裝(SiP)的多晶片形式整合在一起,是超越摩爾定律(More than Moore's Law)的技術;而為了完整系統整合的「系統摩爾定律(System Moore's Law,SM)」概念則催生了「汽車系統級封裝(Automotive System-on Package,A-SOP)」,具備旁大且極具成長潛力的市場(圖7)。
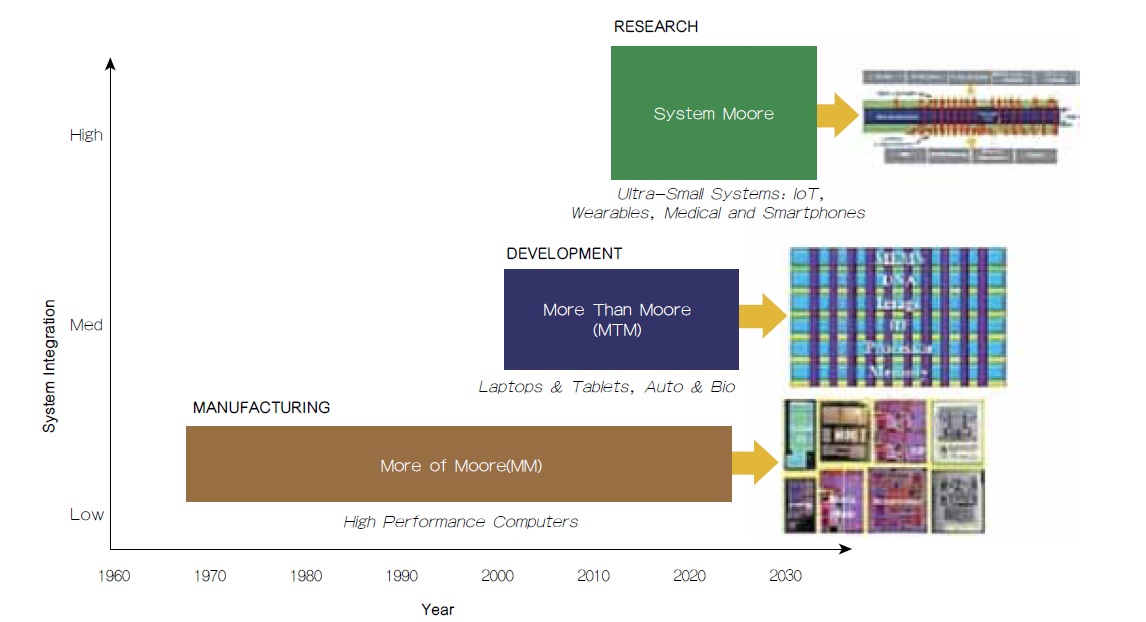
圖7 喬治亞理工學院提出了成立汽車電子產業聯盟的構想。
看見周遭人類與接近某個現場
高度自動化和自動駕駛車輛的開發人員必須考察複雜的人類行為,讓自動駕駛汽車能觀察、理解、模型化、推斷和預測車廂內的乘客以及車輛周遭行人、汽車行駛區域內的人類行為(圖8)。
![]()
而因為成像研究已經取得了顯著的進步,這將有助於控制空間接近(space approach);這些類型的研究和實驗將有助於阻止自動駕駛車輛發生交通事故並危及人身安全,因為這些感測器系統正隨著演算法的成熟不斷演進(圖9)。
關於以整體性方法了解一個狀況的來龍去脈,以及處理許多異常和意料之外場景和目標物的相關技術,還有許多需要學習的;包括對觀察到的物體(包括人和汽車)之細微短/長期活動資訊加以擴展分析,以及在被完全不可預知的人或車輛包圍的條件下預測活動事件並做出決策的預測等。
聲音檢測和分析
目前的麥克風產品發展以及聲音品質技術已經有重大進步,因此筆者認為自動駕駛車輛的另一個感測器資料來源一定是聲音;這種新增的聽覺輸入與所有視覺感測器,將共同為處理器和演算法添加另一層資訊輸入,這有助於提高關鍵的決策判斷能力,從而確保道路上自動駕駛車輛的安全。
人類對汽車喇叭,以及救護車、消防車和警車的警笛聲都會有所反應,筆者相信我們也需要為自動駕駛車輛增加聽覺,以完善對駕駛人的模擬。
麥克風技術已有不少提升,包括聲音品質,以及具備能夠耐受惡劣車用環境的高強韌度MEMS設計,還有降低雜訊、低功耗運作以及動態範圍等性能的改善。
小結
我們可以說,要決定是否讓不需要人類干預之全自動駕駛車輛上路,現在還不是時候;還有許多工作要做。而感測器科學與工程技術還有成熟的演算法正在快速發展,以預測人類和汽車的隨機行為並迅速做出反應,目標是避免車輛和財物的損失,當然還有最重要的──保障人們的生命安全。


 留言列表
留言列表