
在MIT的光子微系統組(Photonic Microsystems Group),本文作者正在開發一種片上激光雷達( lidar-on-a-chip )系統,它比一角硬幣還小,沒有活動式零件,而且能以低成本進行大規模生產,可用於自動駕駛汽車、無人機和機器人。
激光探測與測距,或者說是激光雷達(Lidar),是一種基於激光的感知技術。它類似於雷達(radar),但是分辨率更高,因為光的波長大約比無線電的波長小10萬倍。這對機器人很重要:因為雷達不能精確地反映細微的特徵,只裝備了雷達模塊的機器人很難捕捉複雜的物體。目前,Lidar主要應用於自動駕駛汽車和機器人,也用於繪製陸地和海洋的地圖以及無人機。對於幾乎所有自動駕駛汽車,以及在商業或工業環境中自動化操作的機器人而言,Lidar系統是必不可少的。
Lidar系統測量3D空間中每個像素到發射器間的距離和方向,這能通過傳感器創造出真實世界完整的3D模型。操作Lidar系統的基本方法是發射一束光,然後測量光在物體表面反射而返回來的信號。Lidar模塊接收到反射回來的信號所需的時間提供了一種直接測量Lidar系統與物體之間的距離的手段。關於物體的額外的信息,比如它的速率或材料成分,也可以通過測量反射回來的信號中的某些特性而得以確定,這些特性包括誘導多普勒頻移(induced Doppler shift)。最後,通過操控發射出去的光,可以測量出環境中許多不同的點,從而創建出完整的3D模型。
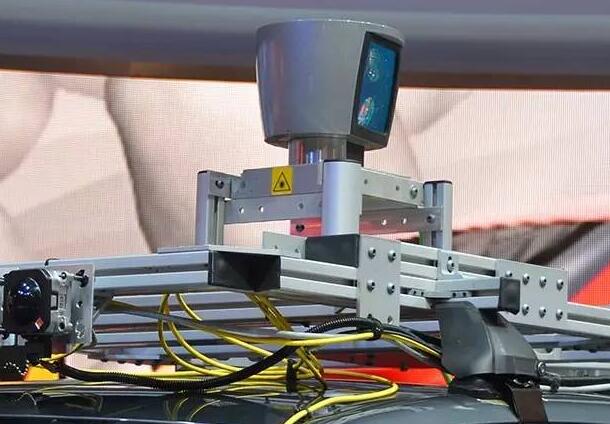
Velodyne HDL-64 Lidar鑲嵌在自動駕駛汽車上。這個設備使用了能機械地四處旋轉的激光器/接收器模塊,這種方法限制了系統的掃描率,同時增加了掃描範圍、複雜性和成本。
大多數Lidar系統——比如你通常能在自動駕駛汽車上看到的Lidar系統——使用離散的自由空間光學組件,比如激光器,透鏡和外部服務器。為了找到一個有用的觀察視野,激光器/接收器機械地四處旋轉,通常還會上下振動。這種機械裝置限制了Lidar系統的掃描率,同時增加了掃描的範圍和復雜性,導致人們擔心其長期可靠性,尤其是在惡劣的環境中。現在,市場上銷售的高端Lidar 系統價位在一千美元到七萬美元之間,這會限制它們在成本最小化領域內的應用。
自動駕駛汽車和機器人等應用領域過度依賴Lidar,而且昂貴的Lidar模塊是阻礙其應用於商業產品的主要因素。我們在MIT的光子微系統組中的工作是嘗試將這些大型的、昂貴的、機械的Lidar系統融合在一個微芯片上,實現在商業化CMOS生產車間裡的大規模生產。
我們使用300毫米晶圓生產Lidar芯片,讓潛在的生產成本大約為每個芯片10美元,每年單位生產量可達到百萬台。這些片上設備用非機械化的光束進行操控,在速度上比當前機械的Lidar系統所能達到的速度快一千倍,而且允許更快的圖像掃描速率。這對精確追踪微小的高速運動的物體是有用的,這些物體只在Lidar的視野中短暫出現,對於高速前行的無人機避開障礙物而言至關重要。
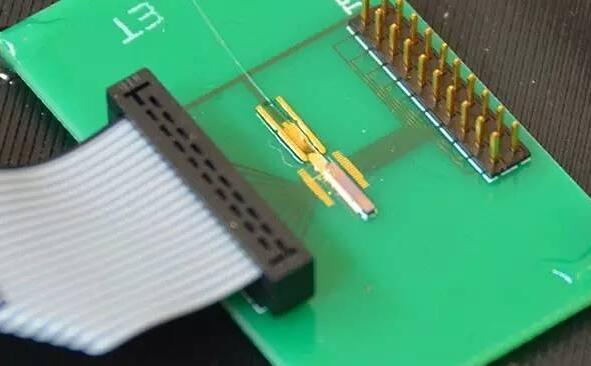
2016年5月份,MIT的原型Lidar芯片在DARPA的五角大樓演示日上的展示
在MIT,我們的此項工作首先從300毫米矽光子(silicon photonics)的發展入手的。矽光子學是一種使用橫截面為幾百納米的矽波導管去創建「光用電線」的芯片技術,其特性類似於光學纖維,但是它們的尺寸更小。然後將這些波導管融合進芯片上的光子線路。將電子與硅光子類比,這就像將分離的電器元件(比如銅導線和電阻器)融合進帶有銅線路以及納米晶體管的微芯片裡。
微電子技術,特別是CMOS技術,已經支持大量生產更小的複式電子電路,並且在電子工業中,矽光子有代替微電子的潛能。矽光子能利用商業CMOS生產車間技術,這也是開發電腦矽基微處理器的技術,能夠以級低的成本進行量產。在過去的十幾年裡,幾個CMOS生產車間已經研發出獨立的矽光子製造工藝。通過該製造工藝,波導管損耗和光學隔離等基本問題得到解決,並且現在該技術支持構建複式光子系統。
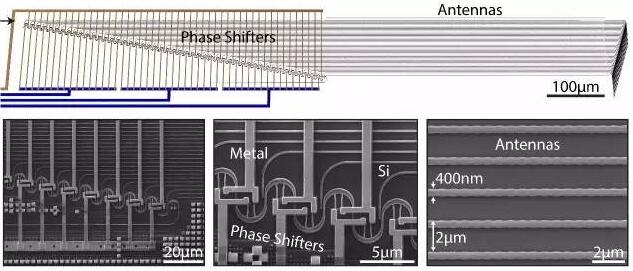
一幅MIT固態Lidar的掃描電子顯微鏡圖。該設備使用熱移向器,通過激光傳輸來加熱波導管,改變了通過它們的光的速度與相位。矽上的刻凹痕作為天線,將光散佈到空閒空間,並且相長干涉會代替鏡頭聚集光束。
DARPA對電子工業的矽光子擴展與集成感興趣,並在2011年啟動為光電多相集成(E-PHI)項目。該項目的兩個重要成果是第一個大規模光學相控陣和第一個廣角可操縱光束陣。這些設備證明了商業CMOS生產車間能像幾十年來製造電子相控陣一樣,生產實用的光學相控陣。電子相控陣已經被用於非機械射電波束控制的雷達應用,並且光學相控陣被看作是小型,低成本的固態Lidar的極佳解決方案。
我們的設備是一塊帶有可控傳輸與接收相控陣,及片上鍺光電探測器的0.5mm x 6mm矽光子集成電路板。激光本身並不是這些特別的集成電路板的一部分,但是我們及其他團隊已經證明了片上激光在未來能被集成到其中。為了操控激光束探測穿過Lidar整個視野的物體,每個天線的相位必須可控。在這個設備的迭代中,熱移向器直接通過激光傳輸加熱波導管。矽的折射指數取決於它的溫度,決定了穿過它的光的速度與相位的變化量。隨著激光穿過波導管,它遭遇了一個刻蝕在矽上的,作為天線的刻凹痕,將光從波導管中散播到空閒空間。每個天線都有它自己的發射圖樣,在所有發射圖樣相長干涉的地方,一道聚焦光束就產生了,該過程不需要鏡頭。
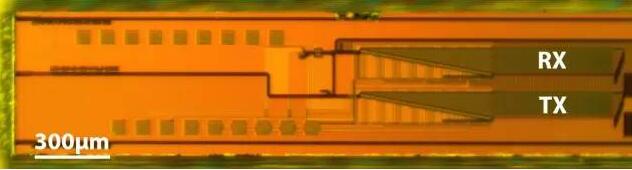
光學顯微圖像下的MIT固態Lidar,一塊帶有可控傳輸與接收相控陣,及片上鍺光電探測器的0.5mm x 6mm矽光子集成電路板。
受天線之間間隔的限制,現在光束的操控範圍約為51°。減小間隔是一個難題,因為間隔也受到限制,太小的矽波導管沒法適當地拘束光束,雖然我們的技術應該能支持將近100°的操控範圍。即使受操控範圍限制,也可以通過在媒介上放置多個Lidar傳感器獲得360°的圖像。
我們的Lidar探測方法基於相干法,而不是直接測量飛行時間,這樣系統就只能對那些由設備傳播出的光束做出反應。這減小了太陽光的影響,大大減小了Lidar系統中的噪聲係數,使其成為物美價廉的光電探測器而不是昂貴的雪崩光電探測器或很難集成在矽光電平台上的光電倍增管。
現在,我們的片上Lidar系統可以探測到長達兩米內的物體,我們希望在一年內能將範圍擴大到10米。最小範圍差不多是5厘米。我們展示了厘米級的縱向分辨率,並期望在2米的距離有3厘米的橫向分辨率。片上Lidar技術的發展路徑很清晰,它能達到100米的範圍,並有可能更遠。
使用其他材料製作集成電路板(比如氮化矽),可能會將輸出功率提高2到3個數量級。我們的製造工藝包括加入了矽的氮化矽層,兩者係統都可利用。另外,一個更大的相控陣將降低光束的衍射,以增加範圍和橫向分辨率。這裡的難題是所能製造的矽波導管及天線的統一度和精確度,製造工藝很可能在未來因平板印刷術而改善。雖然我們承諾可以為Lidar應用造出範圍非常大的相控陣,但以現有的技術,到底能造多大仍然是不明確的,而且這很可能成為未來該技術在範圍上的限制因素。
DARPA最近啟動了一個後續項目,叫做模塊化的光學孔徑構建塊(MOABB),該項目專注於在即將到來的幾年裡擴展該矽光電Lidar的工作。雖然MOABB項目不是我們學術研究小組的一部分,但我們計劃在E-PHI項目結束後,將我們的相控陣工作擴展至空閒空間交流,以支持多個內部傳輸速度大於40Gb/s的光子芯片。我們也在利用像Li-Fi和全息攝影這樣可以被人眼所見的應用來開發可見光相控陣。
我們相信商業的片上Lidar解決方案將在近幾年出現。低成本的、低調的Lidar系統會被廣泛應用於無人駕駛汽車和機器人。那時一輛車或一個機器人能安裝多個價格低廉的Lidar模塊。由於高分辨率、低形狀係數和低成本,這些片上Lidar系統甚至能安裝在機器人的手指上,使其看到自己抓的是什麼。這些技術的發展能改變Lidar系統設備的操作方式,帶來許多我們想都沒想過的Lidar系統的應用方式,這可能會改變Lidar系統的格局。


 留言列表
留言列表